YMConnect requires some controller parameters to be set. If YMConnect still fails to connect to your robot controller after setting these parameters, please contact your local Yaskawa office to enable the High Speed Ethernet Server function.
¶ Open firewall on PC
YMConnect requires UDP ports 10040, 10041 to be open.
¶ Set Security Level
In order to set these parameters, set the security level by doing the following.
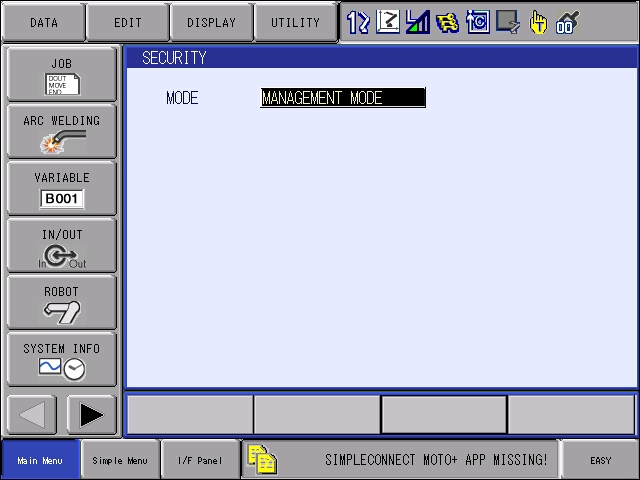
1.Open SYSTEM INFO and press the SECURITY button.

- Select mode and change it to
MANAGEMENTmode. (Default password is all9's)
¶ ALL CONTROLLERS
-
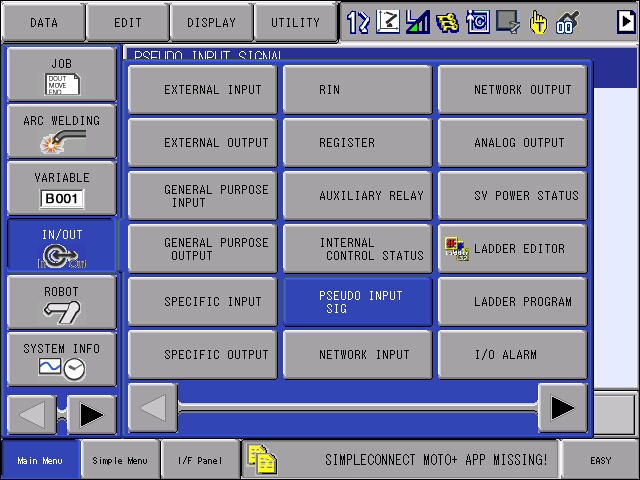
Open the Pseudo Input Signal display by tapping
IN/OUTand selectingPSEUDO INPUT SIG.
-
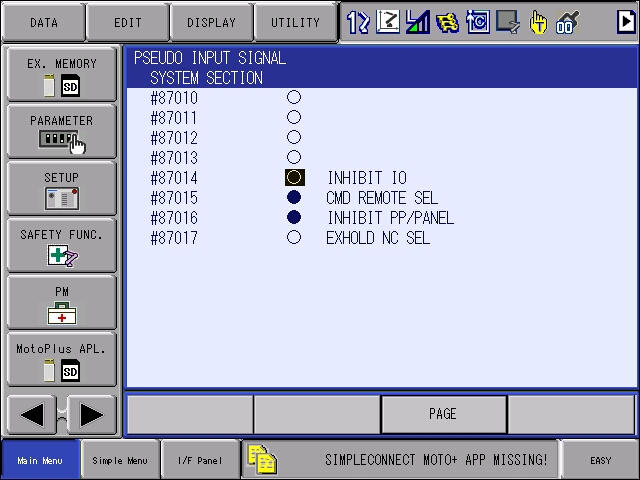
Pseudo Input signal
CMD REMOTE SELshould be ON. If it is not, navigate to the circle next to it and press INTERLOCK + SELECT to turn it on. (#82015for DX100 and FS100.#87015for newer generation controllers.)
-
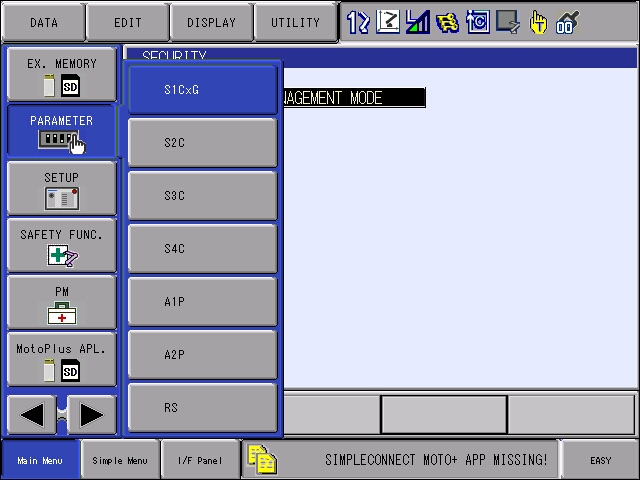
Open the parameter menu by selecting
PARAMETER. SelectRS.
-
Set the following
RSParameters
RS0 = 2 (Protocol - BSC like)
RS5 = 1 (Host Control)
RS7 = 2 (Allow reading and writing outside of remote mode)
RS22 = 1 (Allow instance 0 for variable index)
RS29 = 1 (Allow upload and writing during playback operation)
RS34 = 200 (Response wait timer A)
RS35 = 200 (Monitoring timer B)
¶ Controller Specific settings
Go back to the PARAMETER menu and select S2C. Set the following parameters as applicable.
DX100 and FS100
S2C409 = 1 (Write I/O and variables in PLAY mode)
DX200, YRC1000, and YRC1000micro
S2C541 = 0 (Write I/O and variables in PLAY mode)
S2C542 = 0 (Write I/O and variables in PLAY mode)
YRC1000 and YRC1000micro
To utilize the Motion Manager Interface, the MotoPlus function must be enabled in Maintenance Mode.
- Boot the controller holding the
MAIN MENUkey. (Release when image appears on the pendant screen.) - Upgrade to
MANAGEMENTsecurity level. - Touch
SYSTEMthenSETUP. - Select
OPTION FUNCTION. - Cursor down to
MOTOPLUS FUNC.and set it toENABLE. - Reboot the controller into normal operation mode.