The MOTOMAN NEXT platform (YNX1000) represents a fundamental departure from traditional industrial robot controllers. While previous generations focused primarily on deterministic, sequential execution, the NEXT platform is built for the era of autonomous robotics. An era where real-time adaptation and hardware-accelerated AI are becoming standard requirements.
¶ Comparison with Traditional Robot Controllers
Let us compare some of the differences in the hardware between the MOTOMAN NEXT and previous generation traditional robot control platforms.

¶ YNX1000 vs. YRC1000
The YRC1000 is a highly capable, traditional industrial controller designed for high-speed, repetitive tasks. It excels in environments where the path is fixed and the logic is linear. The YNX1000 looks to bring that same reliability and capability to a broader, more flexible environment.
-
Logic Execution:
The YRC1000 relies on a standard CPU to manage motion and logic. The YNX1000, however, incorporates the Autonomous Control Unit (ACU), a parallel compute device that offloads complex decision-making from the main Robot Control Unit (RCU). -
Adaptability:
While the YRC1000 follows pre-programmed "points," the YNX1000 offers the option to calculate collision-free paths and identify objects dynamically, allowing the robot to respond to an unstructured environment.
¶ ACU vs. IPC
A common way to add more compute power for advanced processing is by connecting an Industrial PC (IPC) to a robot controller via an Ethernet connection. While this provides additional compute power, it introduces several challenges that the MOTOMAN NEXT platform helps solve:
-
Integration and Latency:
An external IPC communicates over a standard network, which can introduce latency and jitter. The ACU in the YNX1000 is a component embedded within the controller cabinet, communicating over a Gigabit Ethernet connection to ensure a fast and reliable connection between RCU and ACU. -
Industrial Hardening:
Unlike many standard IPCs, the ACU is fully integrated into the robot's thermal and electrical management system, providing an industrial-grade solution as part of a single product.
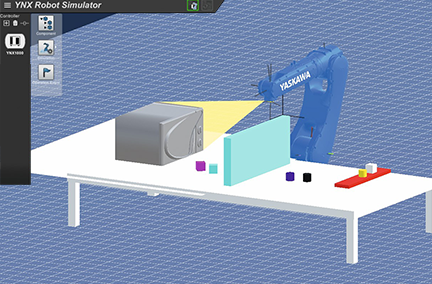
¶ Sim-to-Real
A critical factor in the success of the MOTOMAN NEXT platform is the mechanical improvements made to the NEX and NHC series manipulators. The physical construction of these robots is specifically optimized to bridge the gap between digital simulation and real-world execution.
¶ High-Rigidity Casting
These new manipulators feature new casting designs that prioritize structural stiffness. In traditional robotics, microscopic structural deflection can occur during high-speed or heavy-load movements. By utilizing high-rigidity castings, NEXT looks to minimize these mechanical deviations. This rigidity is essential for Sim-to-Real workflows: where a path is calculated in a virtual environment , the physical robot must follow that trajectory with reliably. This rigidity ensures the "real" performance will mirror the "simulated" performance without requiring extensive manual tuning to compensate for mechanical fluctuations.
¶ SigmaX Servo Technology
The integration of SigmaX servo motors further enhances this performance. These next-generation motors provide higher resolution and faster response times than standard actuators.
- Enhanced Tracking:
SigmaX motors allow the robot to follow more dynamic, high-speed trajectories by utilizing the new higher resolution motor encoders.
¶ Improving Sim-to-Real Performance
The combination of rigid mechanical castings and SigmaX motor precision creates a highly deterministic system. In autonomous robotics, the greatest challenge is often the move from Software-in-the-loop (SIL) to Hardware-in-the-loop (HIL) testing. A common occurrence when moving from SIL to HIL is that the robot will behave differently due to mechanical and physical constraints not properly accounted for during the simulation step. Because the NEXT hardware is more mechanically stable, the "Skills" developed on the ACU can be deployed with the confidence that the physical arm will execute them as planned in the simulation. This reduces development time and ensures that a more reliable development cycle.
¶ Smart Pendant for Android
The Smart Pendant interface is traditionally provided on dedicated teach pendant hardware. The YNX1000 offers an alternative by moving to an Android-based platform. This move to a Tablet Pendant offers several distinct differences:

-
Hardware Flexibility:
Unlike traditional pendants that are tied to a specific controller generation, the use of Android allows for high-resolution displays, modern processors, and standardized connectivity. -
User Experience:
The interface utilizes a standard Android OS which reduces the learning curve for new operators accustomed to consumer mobile devices. -
Application Ecosystem:
Because the environment is Android-based, the Tablet Pendant can run specialized APKs (Android Package Kits). This allows for easier updates and the integration of custom apps alongside standard robot control functions.
Custom User Applications:
When developing user apps for the ACU it is possible to host user interfaces through multiple means when using the Android Tablet. Developers have the opportunity to choose from:
- Smart Pendant Extensions
- Web Apps (accessed via browser)
- Custom Android APKs
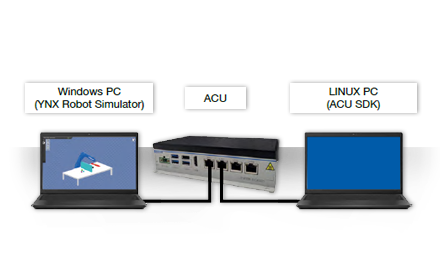
¶ Shift from MotoPlus to Docker
For longtime YASKAWA developers, the most significant change is the absence of MotoPlus.
In previous controllers like the YRC1000 or DX200, MotoPlus was the primary C-language SDK used to develop custom applications. MotoPlus is not available on the YNX1000. Instead, the NEXT platform adopts more modern technologies:
![]()
-
Containerization:
Applications are now built as Docker containers. This moves development away from the proprietary MotoPlus environment and into a standardized Linux ecosystem more commonly used amongst developers. -
Scalability:
By using Docker and the ACU SDK, developers can use a wide array of modern libraries (like OpenCV, TensorFlow, or ROS2) that were difficult or impossible to implement within the constraints of MotoPlus. -
Communication:
The ACU comes equipped with several Standard Services that each provide distinct functionality. These services promote ease of integration for developers by exposing their APIs over gRPC, a communication protocol that allows for development with multiple programming languages. -
Security and Isolation:
Docker provides a layer of isolation that ensures a user application cannot inadvertently crash the core robot motion safety systems. This level of protection was not inherently found in the MotoPlus environment, as crashing of a MotoPlus application could previous take down the system and become difficult to debug.
¶ Integration of Vision Processing
MOTOMAN NEXT differentiates itself from traditional controllers primarily through its native vision integration. Unlike standard robot systems where vision is often an "add-on" requiring complex third-party hardware and custom communication drivers, MOTOMAN NEXT treats vision as a core, embedded service.
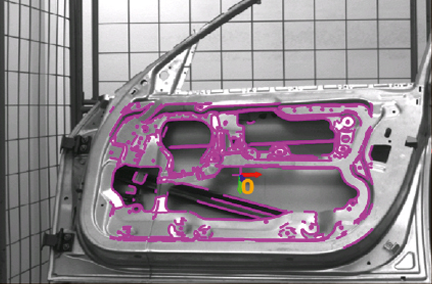
¶ The Machine Vision Service
The heart of this integration is the Machine Vision Service (MVS) running directly on the ACU. This service handles the heavy lifting of image acquisition and processing, exposing vision proceedures and gRPC APIs that allow user applications to request visual data or object coordinates without managing camera drivers or low-level protocols. Because it runs on the ACU hardware, it can perform vision processing with minimal latency, providing the first set of tools necessary for autonomous decision-making.
¶ Machine Vision Editor
The MVS comes equipped with the Machine Vision Editor, a dedicated graphical user interface designed for rapid setup and vision procedure creation.
-
Quick Configuration:
The editor allows users to define vision jobs, set exposure parameters, and test recognition logic in a visual environment rather than through lines of code. -
Seamless Integration:
Once a vision job is configured in the Editor, it is easily called by either INFORM or gRPC APIs, allowing a "Skill" to activate the camera and receive results instantly.
¶ Simplified Calibration Methods
One of the most significant hurdles in robotic vision is the calibration between the camera's 2D coordinate system and the robot's 3D workspace. MOTOMAN NEXT simplifies this through standardized calibration methods:
- Hand-eye Calibration:
The system provides a built-in method for calibrating both moving and stationary camera perspectives.
By combining the specialized processing power of the ACU with a streamlined software suite, MOTOMAN NEXT reduces vision setup times from days to hours, making advanced perception accessible for a wider range of industrial applications.
¶ Autonomous Path Planning
A core distinction of the MOTOMAN NEXT platform is its move away from fixed-point motion toward Autonomous Path Planning. In traditional robotics, a programmer manually teaches every point and the specific path the robot must follow. With MOTOMAN NEXT, the controller offers the option to plan its own path around a fixed and dynamic environment.
¶ Dynamic Obstacle Avoidance and Environmental Modeling
Unlike traditional controllers, the ACU can maintain a digital model of its physical surroundings. By integrating data from sensors or vision systems, the Path Planning Service (PPLS) can:
-
Identify Obstacles:
Circumnavigate fixed or dynmaic objects within the workspace where traditional forms of movement may otherwise cause collision. -
Calculate New Routes:
Reroute the robot arm to avoid collisions while still reaching the target objective. -
Environmental Awareness:
Scale the speed and acceleration based on the proximity of surrounding equipment or structures.
| ⬅️ Previous | Next ➡️ | |
|---|---|---|
| The Basics | What is the ACU? |